



U skladištu postoje različite vrste polica za skladištenje, a metode skladištenja i preuzimanja su uglavnom podijeljene u sljedeće kategorije, uključujući ručno skladištenje i preuzimanje, skladištenje i preuzimanje viljuškarom i automatsko skladištenje i preuzimanje. Danas mnoga preduzeća žele da realizuju automatizovan rad skladišta, pa žele da koriste automatizovane skladišne police. Na primjer, četverosmjerni stalak za automobil je vrsta automatiziranog stalka za skladištenje. Kako četverosmjerni šatl AGV ulazi i izlazi iz skladišta? Analizirano je skladište teških polica za proizvodnju Haigris.

Četverosmjerno skladište
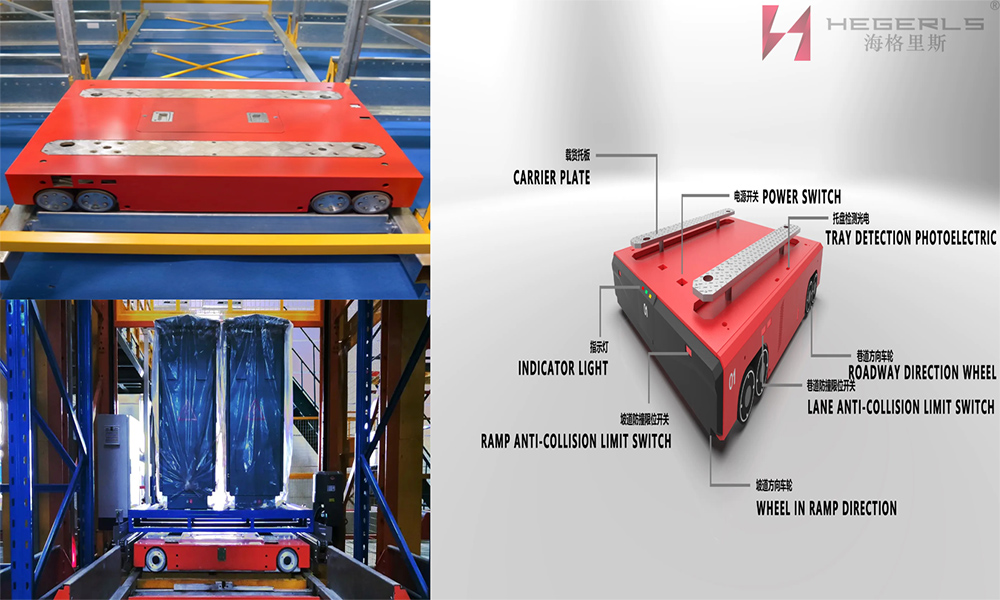
Četvorosmjerni šatl vagon opremljen je sa 12 kotača, koji se mogu kretati u četiri smjera duž ravni staze i slobodno doći do bilo kojeg teretnog prostora u skladišnoj ravni. Četverosmjerni šatl pokreće se točkovima s obje strane istovremeno kako bi se osiguralo da se karoserija automobila ne skreće tokom rada, a može se kretati naizmjenično duž uzdužnih i poprečnih šina na trodimenzionalnoj polici.

U isto vrijeme, četverosmjerni šatl je inteligentni uređaj za rukovanje koji može hodati ne samo uzdužno već i bočno. Četverosmjerni šatl ima visoku fleksibilnost, može mijenjati radni put po želji i prilagođavati kapacitet sistema povećanjem ili smanjenjem broja šatl automobila. Ako je potrebno, na vršnu vrijednost sistema može se odgovoriti uspostavljanjem režima rasporeda radnog tima vozila, rješavanjem uskog grla operacija ulaska i izlaska, a mogu se i međusobno zamijeniti. šatl ili liftovi se mogu poslati kroz dispečerski sistem kako bi nastavili sa dovršavanjem operacije bez uticaja na kapacitet sistema. Ovaj uređaj je pogodan i za skladištenje niskog protoka i skladištenja velike gustine, kao i za skladištenje velikog protoka i velike gustine. Može postići veću efikasnost, troškove i resurse.
Kako četverosmjerni šatl AGV ulazi i izlazi iz skladišta?

1) Način skladištenja
a) Tehničari inteligentnog četverosmjernog šatla prvo uključuju inteligentni četverosmjerni šatl i pripremaju ga. Inteligentni četverosmjerni šatl je u stanju pripravnosti;
b) Nakon potvrde lokacije preuzimanja inteligentnog četverosmjernog šatla, WCS će planirati rutu vožnje prema trenutnoj lokaciji i odredišnoj lokaciji inteligentnog četverosmjernog šatla, a zatim će osoblje distribuirati robu inteligentnom četverosmjernom šatlu shuttle kroz WCS;
c) Inteligentni četverosmjerni šatl počinje da izvršava zadatak isporuke prema primljenoj komandi zadatka;
d) Na stazi ukrštanja, inteligentni četverosmjerni šatl putuje u modu pomaka kroz stvarnu udaljenost. Tokom procesa vožnje kontinuirano skenira tragove kroz koje prolazi donji dio karoserije vozila. Svaki prelaz koji prođe, on procjenjuje i kalibrira udaljenost koju pređe skeniranjem tragova. Kada je blizu odredišta, fino podešava poziciju za parkiranje preko bočnog laserskog senzora kako bi se postiglo precizno pozicioniranje parking pozicije;
e) U podkanalu, inteligentni četverosmjerni šatl može skenirati poprečnu stazu i reflektor bočnog kalibriranja retrovizora, procijeniti i provjeriti udaljenost vožnje skeniranjem pozicije tačke i postići preciznu kontrolu pozicioniranja u podkanalu kako bi stigao do odredišta;
f) Kada inteligentni četverosmjerni šatl stigne na odabranu komisionu poziciju, paleta se spušta, roba se postavlja na policu, a WCS sistem je obaviješten o završetku zadatka isporuke;
g) Inteligentni četverosmjerni šatl nastavlja primati instrukcije zadatka ili se vraća u zonu pripravnosti.
2) Način isporuke
a) Tehničari inteligentnog četverosmjernog šatla prvo uključuju inteligentni četverosmjerni šatl i pripremaju ga. Inteligentni četverosmjerni šatl je u stanju pripravnosti;
b) Nakon potvrde lokacije branja inteligentnog četverosmjernog šatla, WCS će planirati rutu vožnje prema trenutnoj lokaciji i odredišnoj lokaciji inteligentnog četverosmjernog šatla, a zatim će osoblje poslati zadatak branja na inteligentnu četvorku -way shuttle kroz WCS;
c) Inteligentni četverosmjerni šatl počinje da preuzima robu prema primljenoj komandi zadatka;
d) Na stazi ukrštanja, inteligentni četverosmjerni šatl putuje u modu pomaka kroz stvarnu udaljenost. Tokom procesa vožnje kontinuirano skenira tragove kroz koje prolazi donji dio karoserije vozila. Svaki prelaz koji prođe, on prosuđuje i provjerava udaljenost koju pređe skeniranjem tragova. Kada se približava odredištu, fino podešava poziciju parkiranja preko bočnog laserskog senzora kako bi postigao preciznu kontrolu pozicioniranja i parkiranja;
e) U podkanalu, inteligentni četverosmjerni šatl automobil skenira poprečnu stazu i reflektor bočnog kalibriranog ogledala, prosuđuje i kalibrira udaljenost vožnje skeniranjem ovih tačaka i ostvaruje kontrolu preciznog pozicioniranja u podkanalu kako bi stigao do odredišta .
Vrijeme objave: Sep-19-2022